地址:北京市海淀区学院路30号
邮编:100083
友情链接
版权所有©2025北京科技大学 建设与技术支持:信息化建设与管理办公室 京公网安备:110402430062京ICP备:13030111号-1

成果主要内容
一、成果简介及主要解决的教学问题
北京科技大学作为我国材料类人才培养的重要基地,始终重视教育教学改革,先后获得2001年、2014年和2022年三项国家级教学成果一等奖。为充分发挥大型仪器设备对于高水平本科人才培养的重要作用,攻克扫描电镜(简称“电镜”)等大型仪器实验教学面临的挑战,自2010年起,聚焦扫描电镜实验教学的痛点问题,率先探索扫描电镜实验教学数字化之路。在电镜行业巨头的支持下,2010年开发电镜光路Flash课件,展示电镜成像原理;2015年,剖切报废电镜,展示电镜结构;2018年,采用3D打印技术实现了电镜模型复刻,基于此2019年制作了可拆装教具;自2020年开始,系统梳理电镜知识图谱,递进实现了沉浸式VR、线上/线下训练、远程操控和过程评价考核系统,多维协同构建了以“知识图谱驱动、数实融合协同”为核心的数字化教学体系,形成了“一核多措、二元驱动、三体并举、四维联动”的电镜教学新范式。这一成果对于破解“复杂难讲、抽象难学、实践难练、成效难评”等电镜教学突出问题取得了显著成效,为我国大型仪器实验教学的数字化转型提供了可复制、可推广的创新范式。
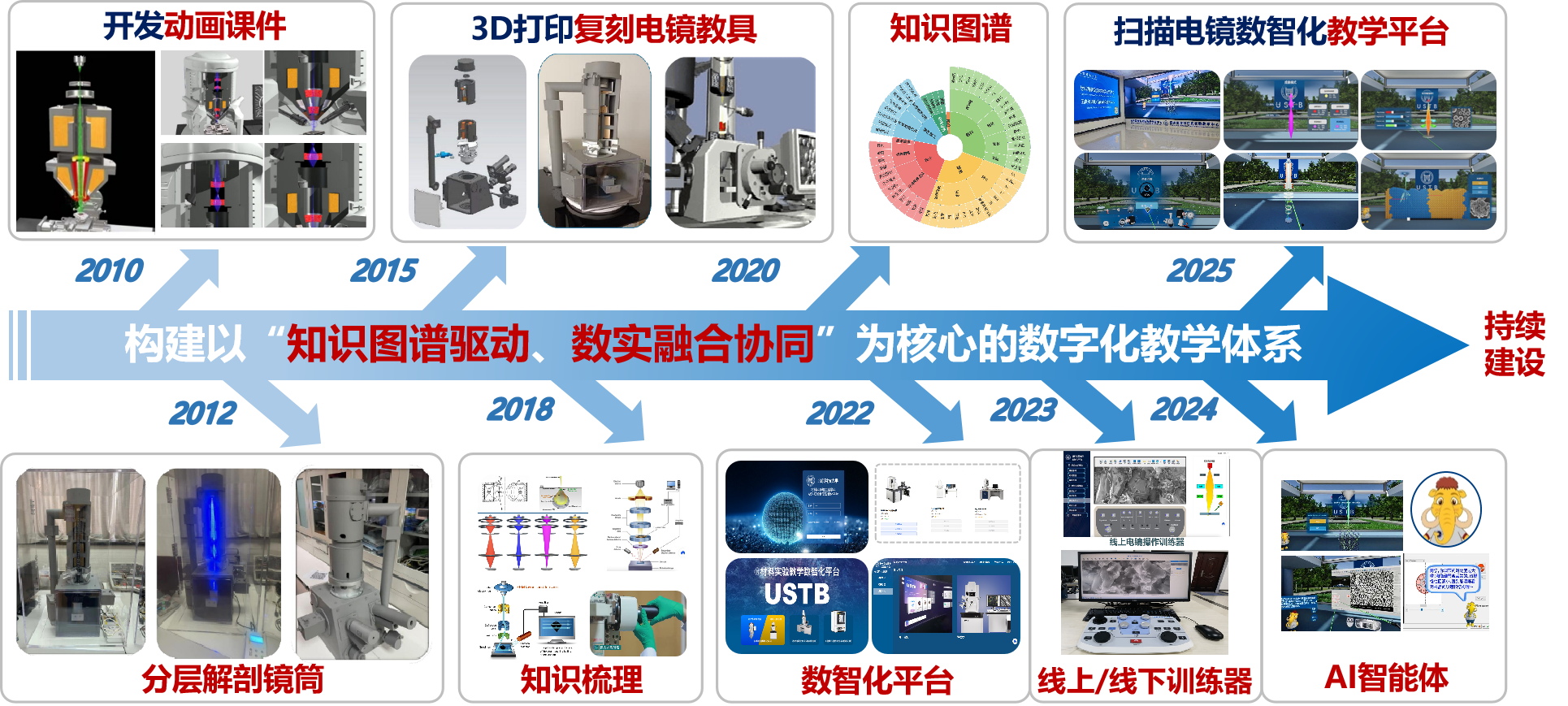
自2010年起,通过开发flash课件、剖切电镜、制作3D打印教具、知识图谱,及浸式VR、线上/线下训练、
远程操控和过程评价考核系统,多维协同构建了“一核多措、二元驱动、三体并举、四维联动”的电镜教学新范式
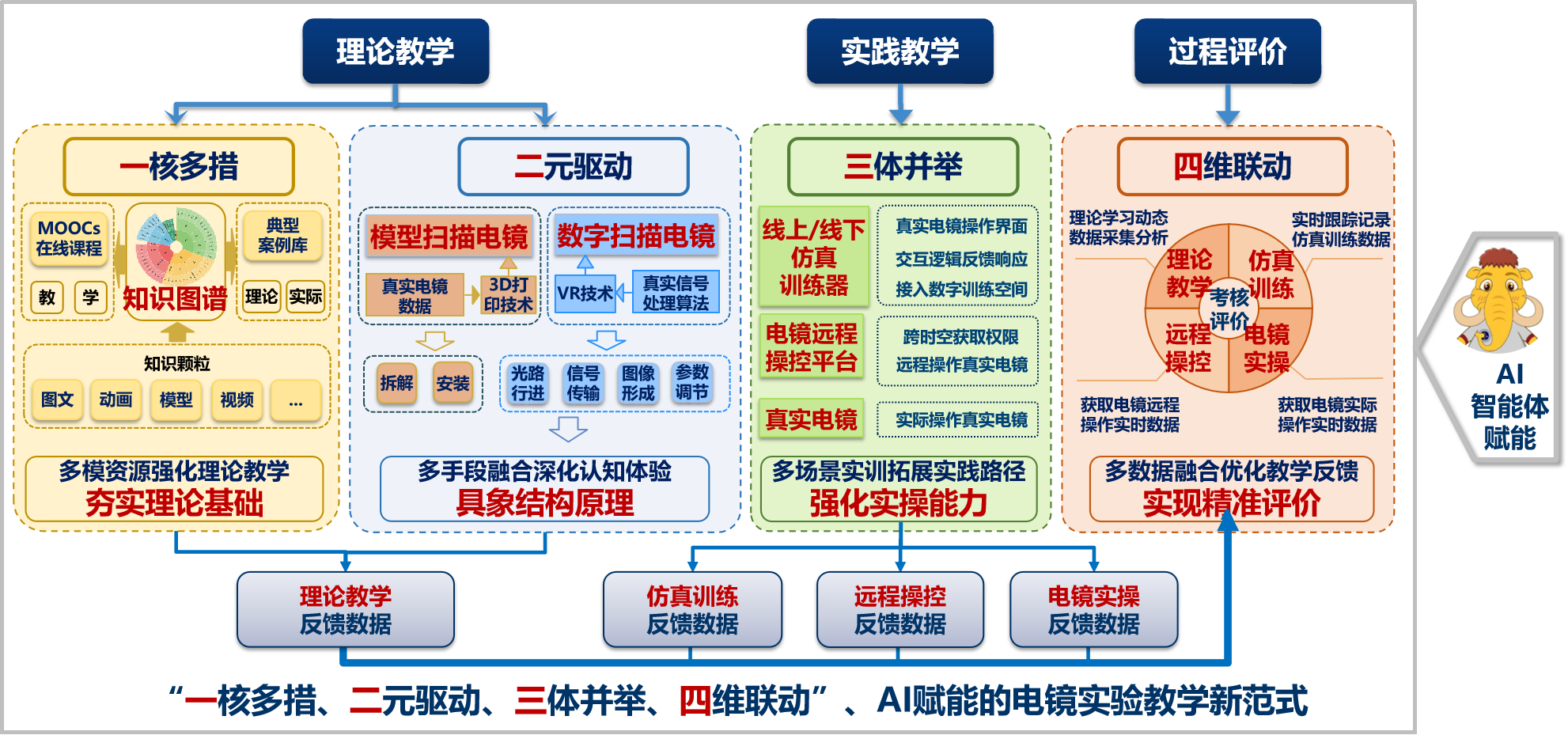
通过理论教学、实践教学和过程评价,形成“一核多措、二元驱动、三体并举、思维联动”、AI赋能的电镜实验教学新范式
一核多措夯实理论基础。针对电镜理论知识庞杂抽象、理解困难等问题,构建以知识图谱为核心的多模融合教学体系,融合图文、动画、模型与视频等资源,实现理论内容结构化与可视化,提升教学直观性与学生理解力,夯实理论基础。
二元驱动具象结构原理。针对电镜结构复杂、原理抽象的教学瓶颈,采用3D打印技术复刻出“模型扫描电镜”,学生可通过拆装部件直观了解设备结构;采用VR技术开发出可交互沉浸式“数字扫描电镜”,可视化呈现运行原理与成像过程,二元驱动具象结构原理。
三体并举强化实践能力。针对电镜设备稀缺、实操训练不足等问题,构建由线上/线下仿真训练器、远程操控平台和电镜实际操作构成的实训体系,精准复现真实操作界面与反馈机制,实现虚实结合、递进培养,显著提升学生的实践动手与综合操作能力。
四维联动实现精准评价。针对教学监测不足、反馈滞后和评价单一等问题,构建涵盖“理论—仿真—远程—实操”的四维全过程数据体系,研发导学智能体实时分析学习行为、识别薄弱环节并生成个性化改进建议,实现从终结性向过程性、智能化评价转变,显著提升教学反馈与学习成效。
成果已应用于我校材料、冶金等专业,服务学生8000余人次,运行84000余机时。承担教改项目23项(国家级2项、省部级4项);获评国家级一流本科课程1项(已公示),教育部优秀案例、创新实验室等荣誉;教师获评国家级、省部级教学荣誉14项;学生获评北京市优秀本科毕业论文21篇,在各级国家级比赛中获奖337人次,其中一等奖55人次;获得中国授权发明专利3项、软件著作权2项;获评校级教学成果奖15项,其中特等奖6项。成果已推广至34所高校,并与5所高校开展远程实验教学试验,国内外42所高校前来交流。
成果解决了以下主要教学问题:
①理论基础难夯实。知识点庞杂抽象,学生理解困难。
②结构原理难具象。电镜结构复杂与运行原理难以呈现,学生缺乏直观认知。
③实践能力难培养。设备昂贵稀少,学生实操机会有限,动手能力培养不足。
④过程评价难实现。评价方式单一,依赖终结性报告,缺乏过程反馈与引导。
二、成果解决教学问题的方法
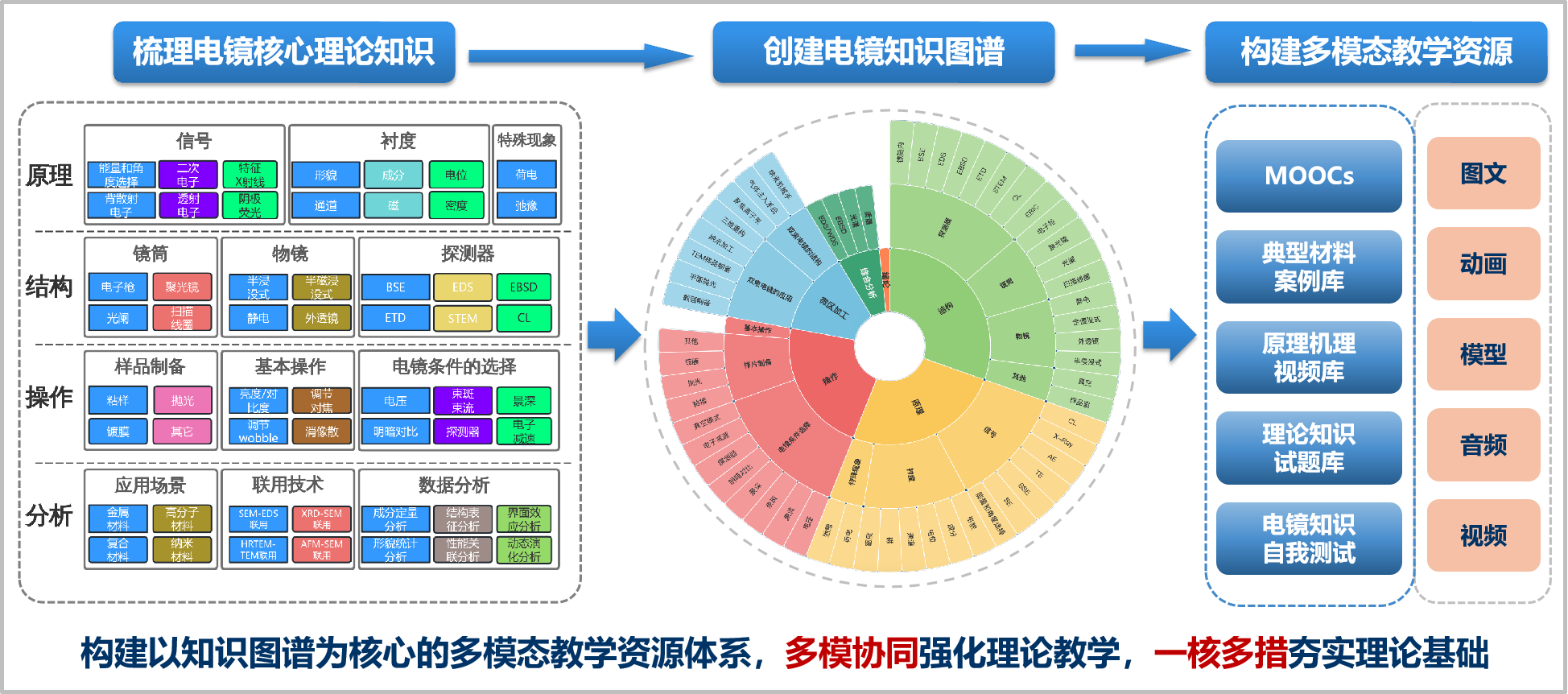
(1)多模协同强化理论教学,一核多措夯实理论基础
针对理论知识庞杂抽象、学生理解困难等问题,系统梳理电子光学系统、信号探测与图像分析等核心知识及其内在逻辑关系,自主构建出电镜知识图谱,以图文、动画、模型、与视频等多模态资源呈现知识颗粒,实现理论知识的结构化与可视化;以知识图谱为核心,建设MOOCs在线课程,开展模块化教与学;构建典型案例库,深化理论与实际相结合。多模协同有效提升理论教学直观性和学生理解力,一核多措夯实理论基础。
一核多措夯实理论基础
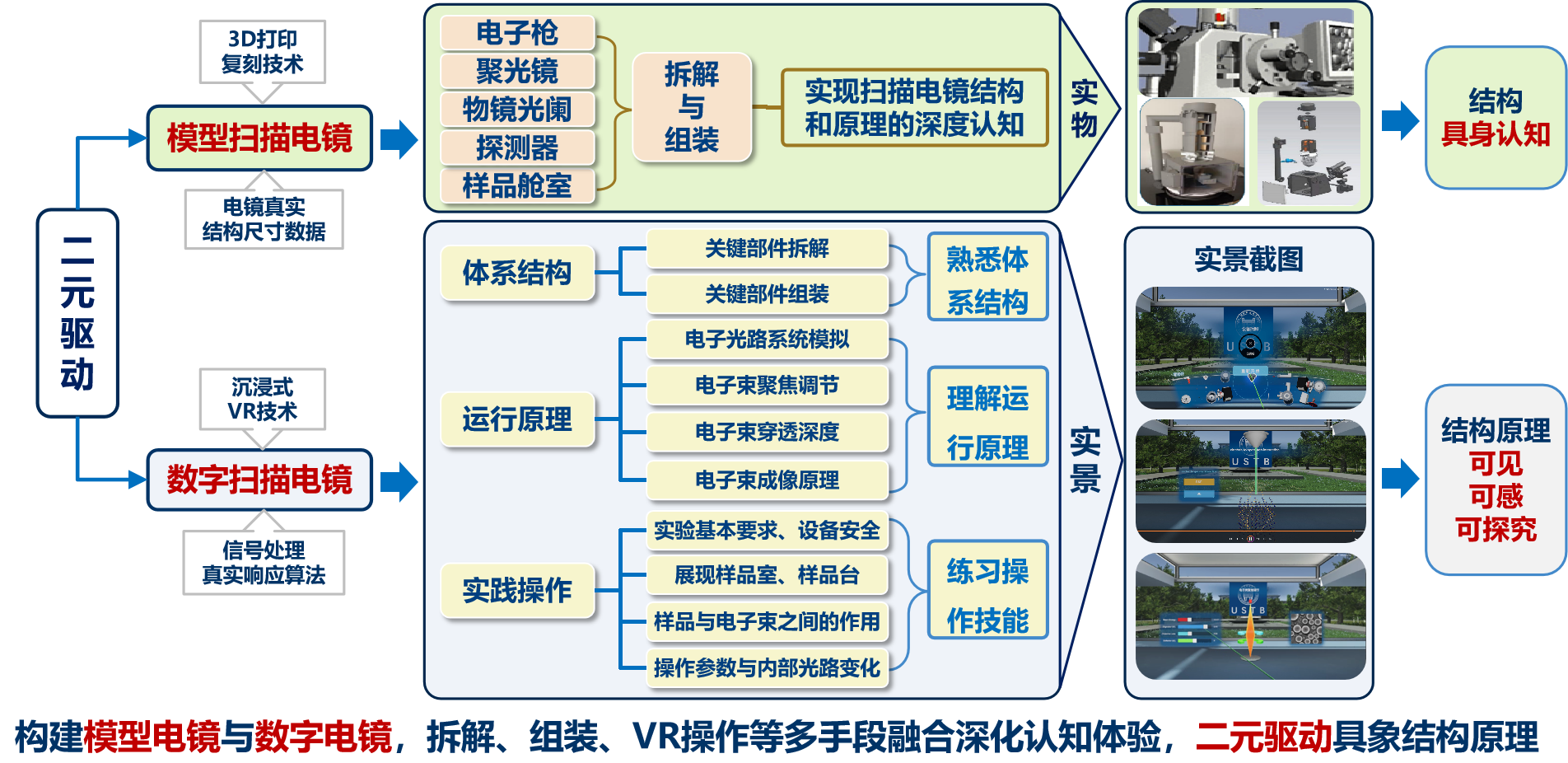
(2)多手段融合深化认知体验,二元驱动具象结构原理
针对电镜结构复杂、原理抽象、认知具象难等教学瓶颈,基于部件真实尺寸数据,采用3D打印技术复刻出可拆装“模型扫描电镜”。学生通过亲手拆装形成对设备结构的具身认知;基于真实信号处理算法,采用VR技术开发出可交互沉浸式“数字扫描电镜”,实现内部结构的立体呈现,支持学生主动探索电子光路行进、信号产生与传输、图像形成全过程,并通过调节参数观察其影响机制。通过“实体复刻+数字再现”,使抽象原理“可见、可感、可探究”,显著提升探究性和趣味性,二元驱动具象结构原理。
二元驱动具象结构原理
(3)多场景实训拓展实践路径,三体并举强化实操能力
针对电镜数量稀少、实操训练不足等难题,构建出线上/线下仿真训练器、远程电镜操控平台和真实电镜相结合的操作训练系统。线上/线下训练器精准复现真实电镜操作界面、交互逻辑和反馈响应,并搭载真实材料数据库。线上仿真训练器支持批量学生同时接入数字训练空间,基于真实操作界面开展操作练习;线下训练器则直接利用电镜真实操作键盘、加载真实材料数据,深入探索各项参数调节对成像效果的影响,具有与操作真实电镜完全相同的体验;远程操控平台经过授权,可通过互联网跨时空获取全部权限操作真实电镜。基础技能达成后,再进行真实电镜实操练习。三者结合构成数实互补、分层递进的实训路径,三体并举强化学生动手能力。
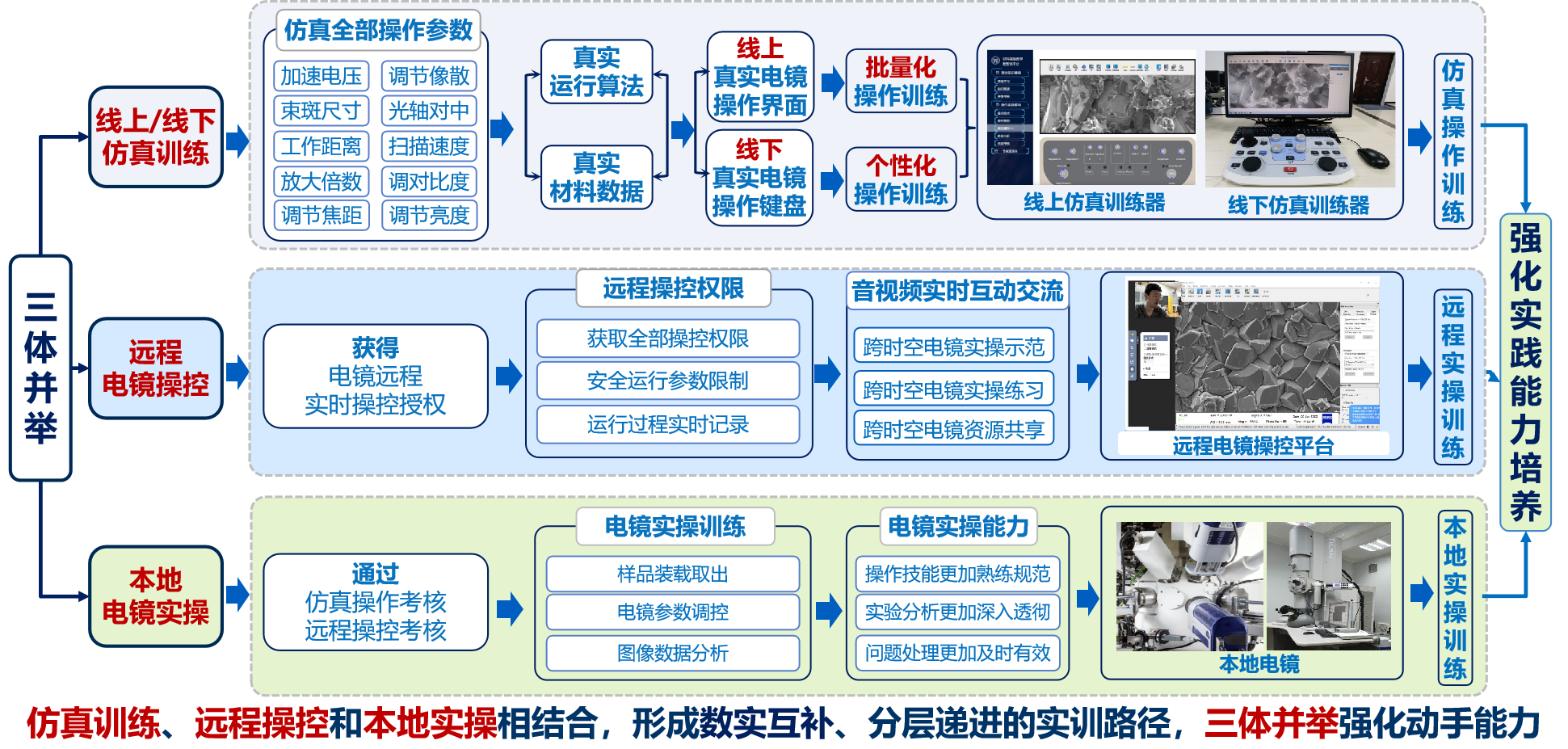
三体并举强化实践动手能力
(4)多数据融合优化教学反馈,四维联动实现精准评价
针对教学过程监测不足、反馈滞后和学习成效评价方式单一等问题,构建出基于“理论教学-仿真训练-远程操控-电镜实操”四维度全过程学习数据采集与分析体系,实时跟踪记录全过程学习行为数据;自主研发的导学智能体可基于过程实时数据,自动实时纠偏、识别薄弱环节并提出针对性改进建议;综合全过程量化客观数据,可分析学生理论知识、实践技能掌握程度,生成个性化表现报告并提供学习导引路径,推动评价方式从单一终结性结果评价向过程性、智能化转变,四维联动达成精准评价。
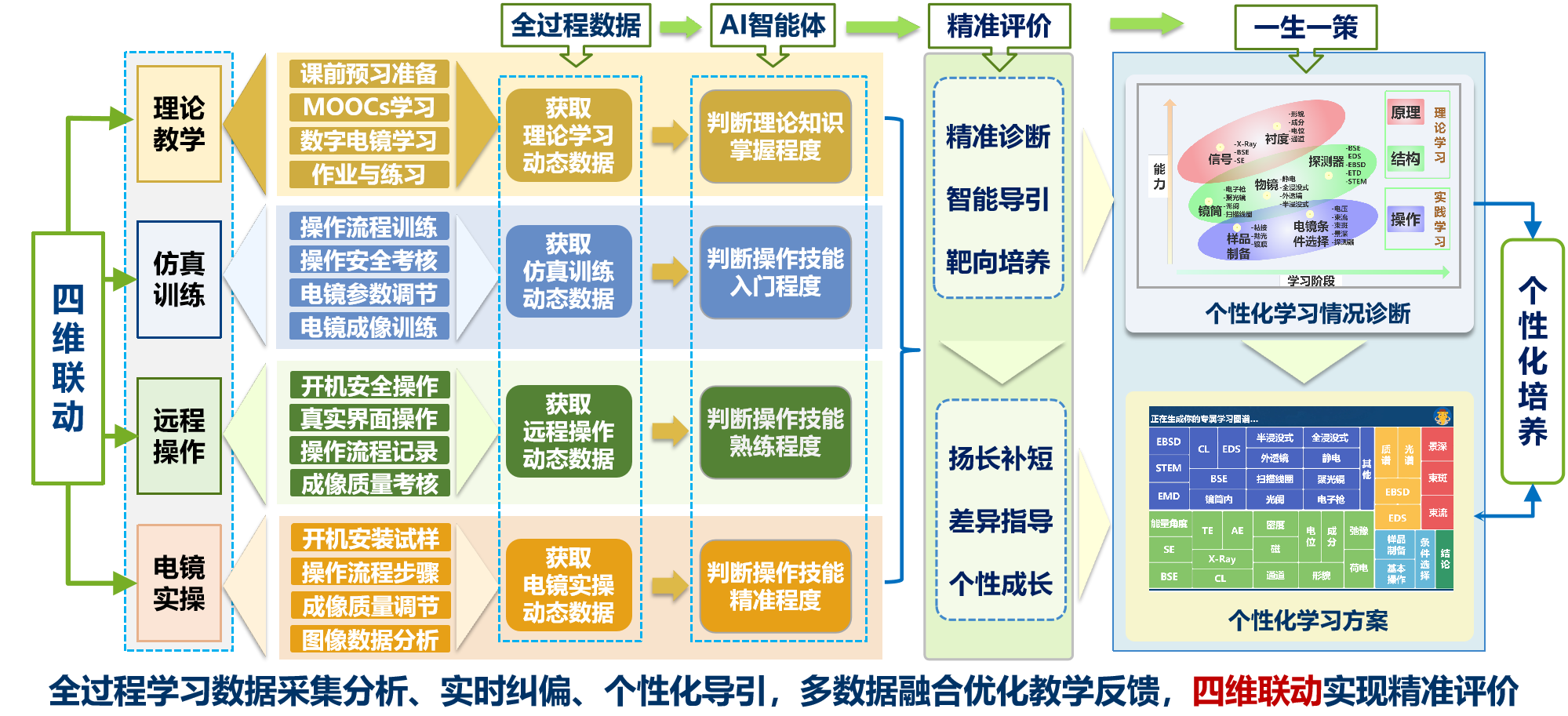
四维联动实现精准评价
地址:北京市海淀区学院路30号
邮编:100083